Portfolio item number 1
Short description of portfolio item number 1

Short description of portfolio item number 1
Short description of portfolio item number 2
Published in 机械制造与自动化, 2022
This article is the result of my undergraduate graduation project.
Published in 2023 International Conference on Advanced Robotics and Mechatronics (ICARM), 2023
Developed an initial soft sensing unit then validated ML-based force calibration and prediction for replacing traditional force gauges.
Published in 2024 6th International Conference on Data-driven Optimization of Complex Systems (DOCS), 2024
This paper is a continuation of the study on “Force Calibration and Prediction of Soft Stretch Sensor Based on Deep Learning.
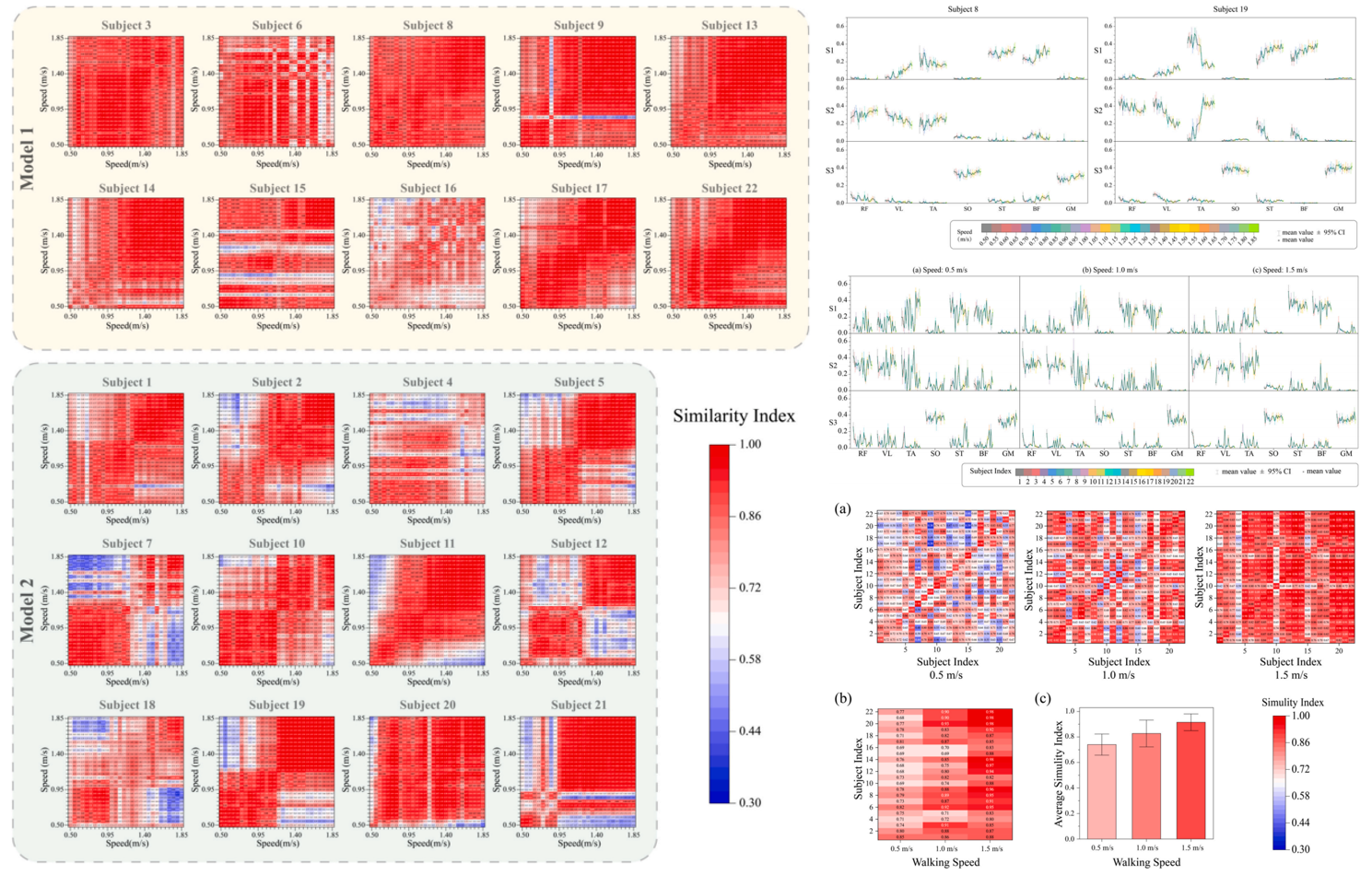
Published in HUMAN MOVEMENT SCIENCE, 2024
This paper discovered some interesting phenomena in lower limb muscle synergies.
Published in IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2025
This study developed a flexible sensing system capable of accurately predicting joint angles and moments, and validated it through a flexible exosuit.
In submission, 2025
Presents a unified and fine-grained controller for humanoid loco-manipulation. (Co-first author, second listed)

In submission, 2026
Compares gait biomechanics between humans and humanoids and highlights key divergences.
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.