Locomotion Joint Angle and Moment Estimation with Soft Wearable Sensors for Personalized Exoskeleton Control
Published in IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2025
Abstract
Recent advancements in flexible sensing and machine learning have positioned soft sensors as promising alternatives to traditional methods for human posture detection. However, most research has centered on calibration, with limited progress in practical applications due to the challenges posed by diverse users and complex scenarios such as human-robot interaction. To address these challenges, this study developed a flexible sensing system capable of accurately predicting joint angles and moments, and validated it through a flexible exosuit. To improve the model’s accuracy and generalization, gait data from eight participants with varying walking patterns were collected. Calibrated data were used as static features and trained alongside dynamic features. The model was pre-trained on alarge open-source dataset and then fine-tuned for our own data. Long Short-Term Memory (LSTM) and Convolutional Neural Network (CNN) models were specifically applied to estimate knee joint angles and hip joint moments, achieving a Mean Absolute Error (MAE) of 4.43◦ and 0.12 Nm/kg, respectively. A flexible exosuit was then developed to provide assistance based on real-time estimation of hip joint moments, enabling personalized control. Testing with five volunteers showed reduced muscle activation, while user satisfaction surveys indicated significant improvements in mobility and comfort. This research not only enhances the practical application of soft sensors but also demonstrates their potential in advancing human-robot interaction.
Data Collection
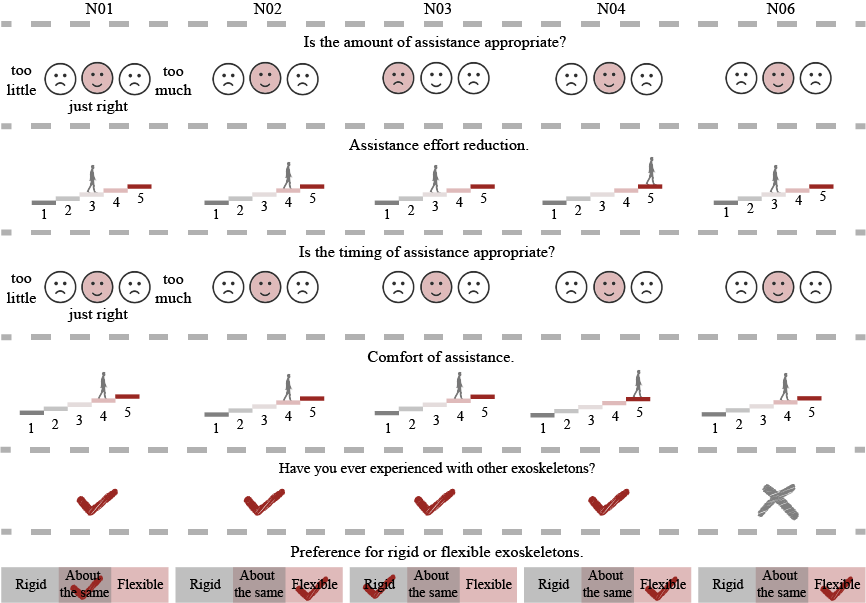
Personalized Assistance Experiments
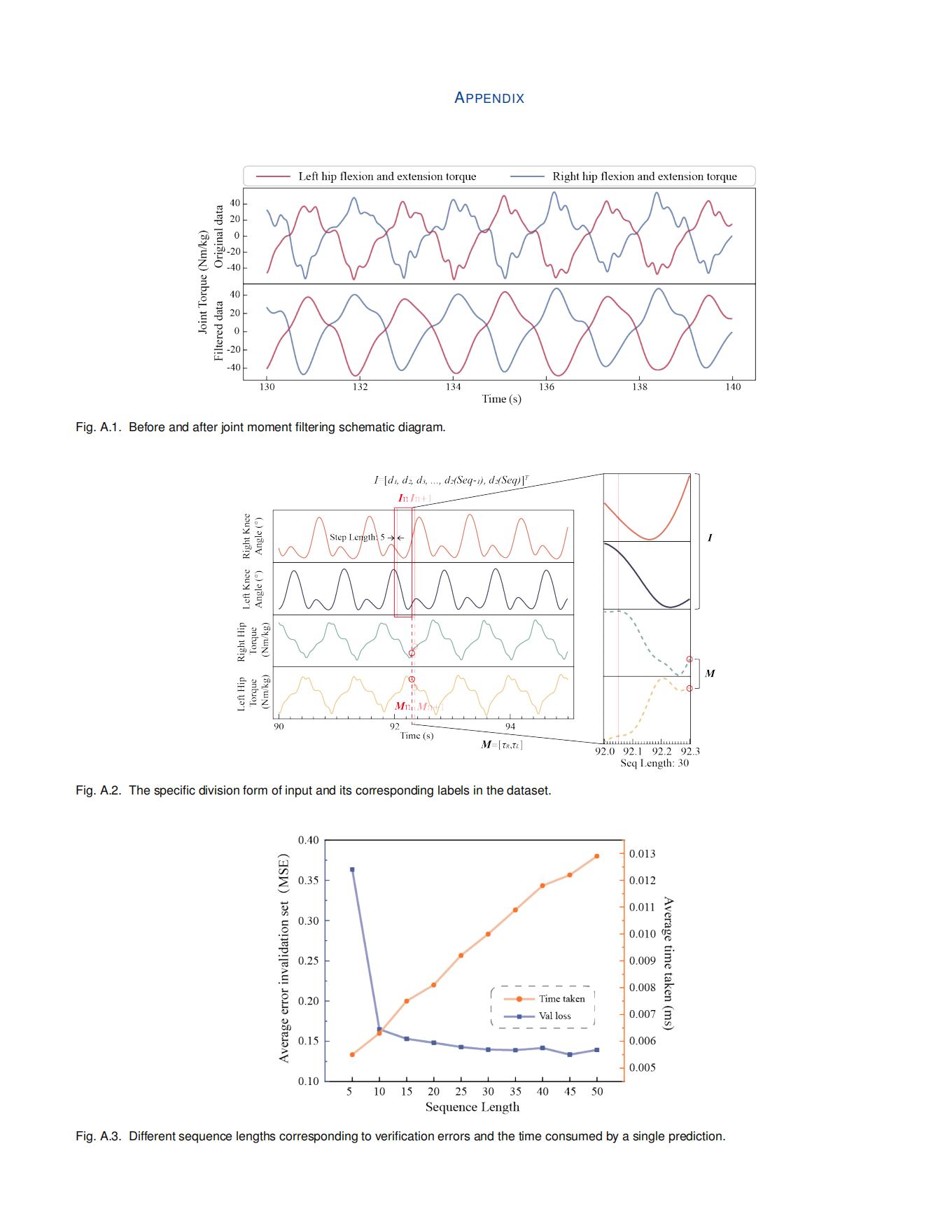
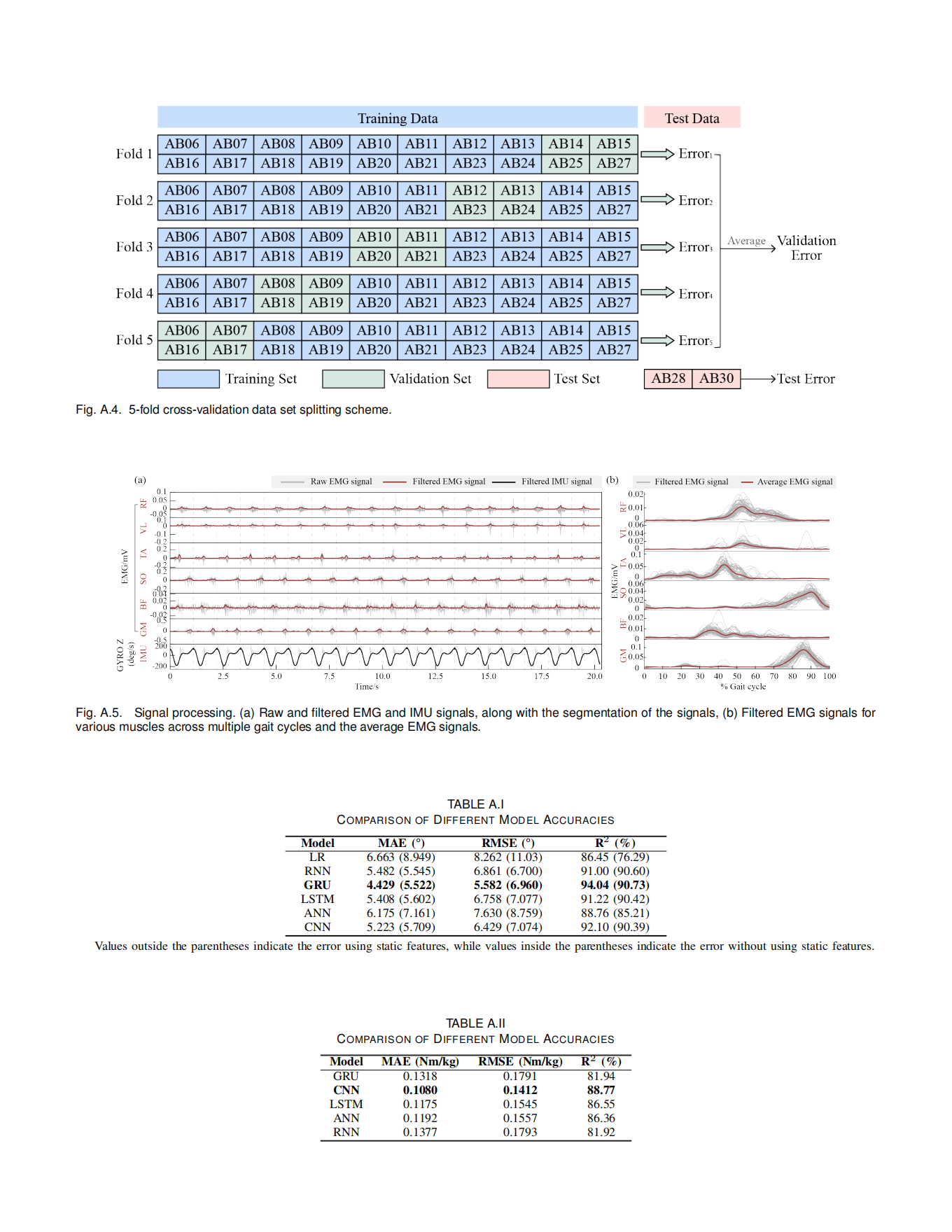
Appendix
Questionnaire Survey Results